







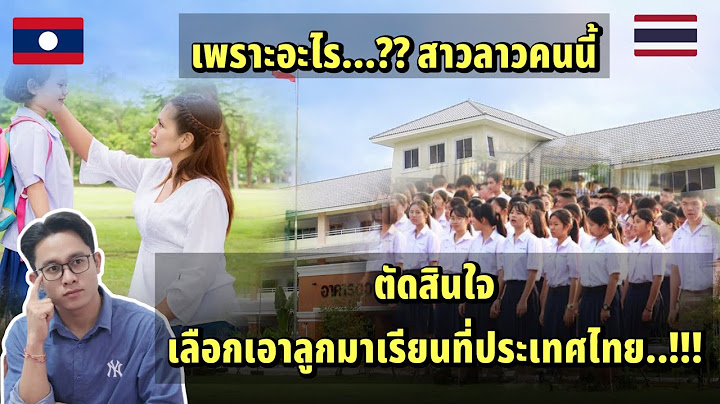
มอเตอร์กระแสตรงจะมีหลักการทำงานโดยวิธีการผ่านกระแสให้กับขดลวดในสนามแม่เหล็ก ซึ่งจะทำให้เกิดแรงแม่เหล็ก โดยส่วนของแรงนี้จะขึ้นอยู่กับกระแสและกำลังของสนามแม่เหล็ก
รูปแสดงโครงสร้างทั่วไปของมอเตอร์กระแสตรง จากในรูปทางเดินของฟลั๊กซ์แม่เหล็ก และสนามแม่เหล็กจะเกิดจากแท่งแม่เหล็กเฟอร์ไรต์ 2 ชิ้นที่ขึ้นรูปเป็นแบบโค้งยึดติดกับตัวถังได้พอดี เพื่อที่จะให้เส้นแรงแม่เหล็กวิ่งเข้าสู่ใจกลางของมอเตอร์ได้ ดังนั้นความเข้มของแม่เหล็กจะขึ้นอยู่กับขนาดความหนาของแม่เหล็กด้วย ซึ่งส่งผลให้ฟลั้กซ์แม่เหล็กวิ่งไปบนตัวถังโลหะ กระแสไฟฟ้าในขดลวดที่พันกับทุ่นโรเตอร์ก็จะทำให้เกิดสนามแม่เหล็กไฟฟ้า และต้านกับสนามแม่เหล็กถาวร จึงเกิดเป็นแรงบิดเพื่อที่จะหมุนทุ่นโรเตอร์ ให้ไปในทิศทางเดียวกันกับทิศทางของสนามแม่เหล็กที่มีแรงมากกว่า กระแสก็จะไหลผ่านไปยังทุ่นโรเตอร์ โดยผ่านแปรงถ่าน ซึ่งจะสัมผัสกับแหวนตัวนำในทุ่นโรเตอร์ และแหวนคอมมิวเตเตอร์ ซึ่งจะถูกแบ่งออกเป็น 3 เซกเมนต์เพื่อที่จะทำหน้าที่นำกระแสเข้าขดลวดนั้นเอง การขับและกลับทิศทางของมอเตอร์กระแสตรง (DC MOTOR)
รูปแสดงการกลับทิศทางของมอเตอร์กระแสตรงโดยใช้รีเลย์
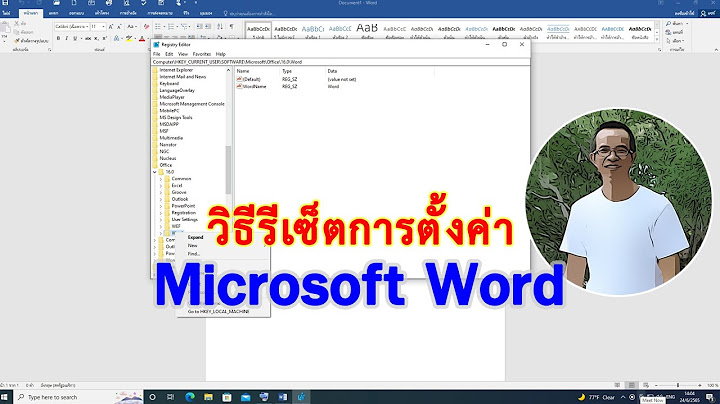
รูปแสดงการใช้ทรานซิสเตอร์เพื่อขับรีเลย์ให้ทำงาน จากรูปเป็นวงจรขับรีเลย์โดยใช้ทรานซิสเตอร์ทำหน้าที่ขยายกระแส
ด้วยเหตุผลเพราะไม่สามารถจะใช้ขา เอาต์พุตของไมโครคอนโทรลเลอร์ป้อนกระแสไฟที่ขดลวดของรีเลย์โดยตรงได้ เนื่องจากว่ากระแสที่จ่ายออกมาจากขา เอาต์พุตของไมโครคอนโทรลเลอร์มีค่าน้อยเกินไปดังนั้นเราจึงต้องมีส่วนของวงจรทรานซิสเตอร์เพื่อที่จะทำการขยายกระแสให้เพียงพอในการป้อนให้กับขดลวดของรีเลย์ ส่วนไดโอดนำมาต่อไว้สำหรับป้องกันแรงดันย้อนกลับที่เกิดจากการเหนี่ยวนำของสนามแม่เหล็กในขณะเกิดการยุบตัว ซึ่งอาจจะทำให้ทรานซิสเตอร์เสียหายได้
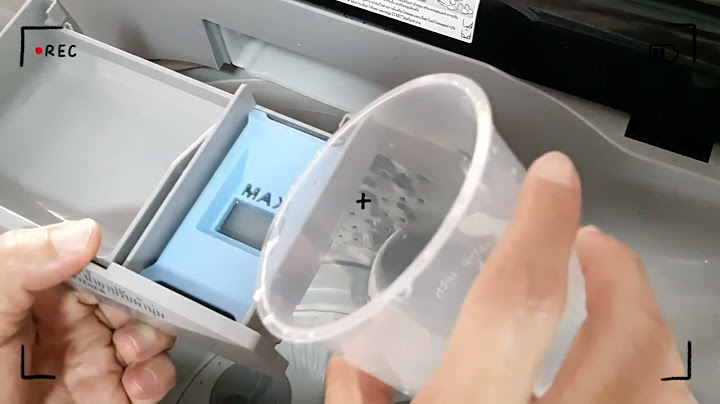
รูป แสดงการใช้ทรานซิสเตอร์เป็นวงจรขับและกำหนดทิศทางของมอเตอร์กระแสตรง จากรูปเป็นวงจรลิเนียร์บริดจ์แอมป์ ซึ่งจะประกอบไปด้วยทรานซิสเตอร์กำลัง 4 ตัวที่ทำหน้าที่ขับ และควบคุมทิศทางการหมุนของมอเตอร์
ถ้าหากกำหนดให้ทรานซิสเตอร์ Q1 และ Q4 อยู่ในสภาวะทำงาน (Active) กระแสไฟฟ้าจะไหลผ่านทรานซิสเตอร์จากซ้ายไปขวา โดยผ่านมอเตอร์กระแสตรงทำให้มอเตอร์หมุนไปทางขวา ในทำนองเดียวกันถ้าหากเราทำให้ทรานซิสเตอร์ Q2 และ Q3 อยูในสภาวะทำงาน (Active) กระแสไฟฟ้าก็จะไหลจากทางขวาไปทางซ้ายซึ่งจะส่งผลให้มอเตอร์กลับทิศทางการหมุนจากทางขวาไปทางซ้าย การควบคุมความเร็วของมอเตอร์กระแสตรง วิธีการมอดูเลชั่นทางความกว้างของพัลส์ (PWM) การมอดูเลชั่นทางความกว้างของพัลส์ PWM (Pulse Width Modulation) จะเป็นการปรับเปลี่ยนที่สัดส่วน และความกว้างของสัญญาณพัลส์ โดยความถี่ของสัญญาณพัลส์จะไม่มีการเปลี่ยนแปลง หรือเป็นการเปลี่ยนแปลงที่ค่าของดิวตี้ไซเกิล (duty cycle) นั้นเอง ซึ่งค่าของดิวตี้ไซเคิล คือช่วงความกว้างของพัลส์ที่มีสถานะลอจิกสูง โดยคิดสัดส่วนเป็นเปอร์เซตน์จากความกว้างของพัลส์ทั้งหมด ยกตัวอย่างเช่น ถ้าหากค่าดิวตี้ไซเคิลมีค่าเท่ากับเท่ากับ 50% ก็หมายถึงใน 1 รูปสัญญาณพัลส์จะมีช่วงของสัญญาณที่เป็นสถานะลอจิกสูงอยู่ครึ่งหนึ่ง และสถานะลอจิกต่ำอยู่อีกครึ่งหนึ่ง ดังรูปและในทำนองเดียวกันถ้าหากค่าดิวตี้ไซเคิลมีค่ามาก หมายความว่าความกว้างของพัลส์ที่เป็นสถานะลอจิกสูงจะมีความกว้างมากขึ้น หากค่าดิวตี้ไซเคิลมีค่าเท่ากับ 100% ก็หมายความว่าจะไม่มีสถานะลอจิกต่ำเลย ซึ่งค่าดิวตี้ไซเคิลสามารถ จะหาได้จากค่าความสัมพันธ์ดังนี้ ค่าดิวตี้ไซเคิล = (ช่วงของสัญญาณพัลส์/คาบเวลาทั้งหมดของสัญญาณ) X100%
|

มอเตอร์ไฟฟ้ากระแสตรง ใช้กับอะไร

กระทู้ที่เกี่ยวข้อง


















ลิขสิทธิ์ © 2024 th.frojeostern Inc.